Digital Signal Processing
This section of the user guide explores functions that are commonly used in the field of Digital Signal Processing (DSP).
Convolution
The conv function calculates the convolution of two vectors.
The convolution is calculated by reversing the second vector and sliding it across the first vector.
The dot product of the two vectors is calculated at each point as the second vector is slid across the first vector.
The dot products are collected in a third vector which is the convolution of the two vectors.
Moving Average Function
Before looking at an example of convolution it’s useful to review the movingAvg function.
The moving average function computes a moving average by sliding a window across a vector and computing the average of the window at each shift.
If that sounds similar to convolution, that’s because the movingAvg function involves a sliding window approach similar to convolution.
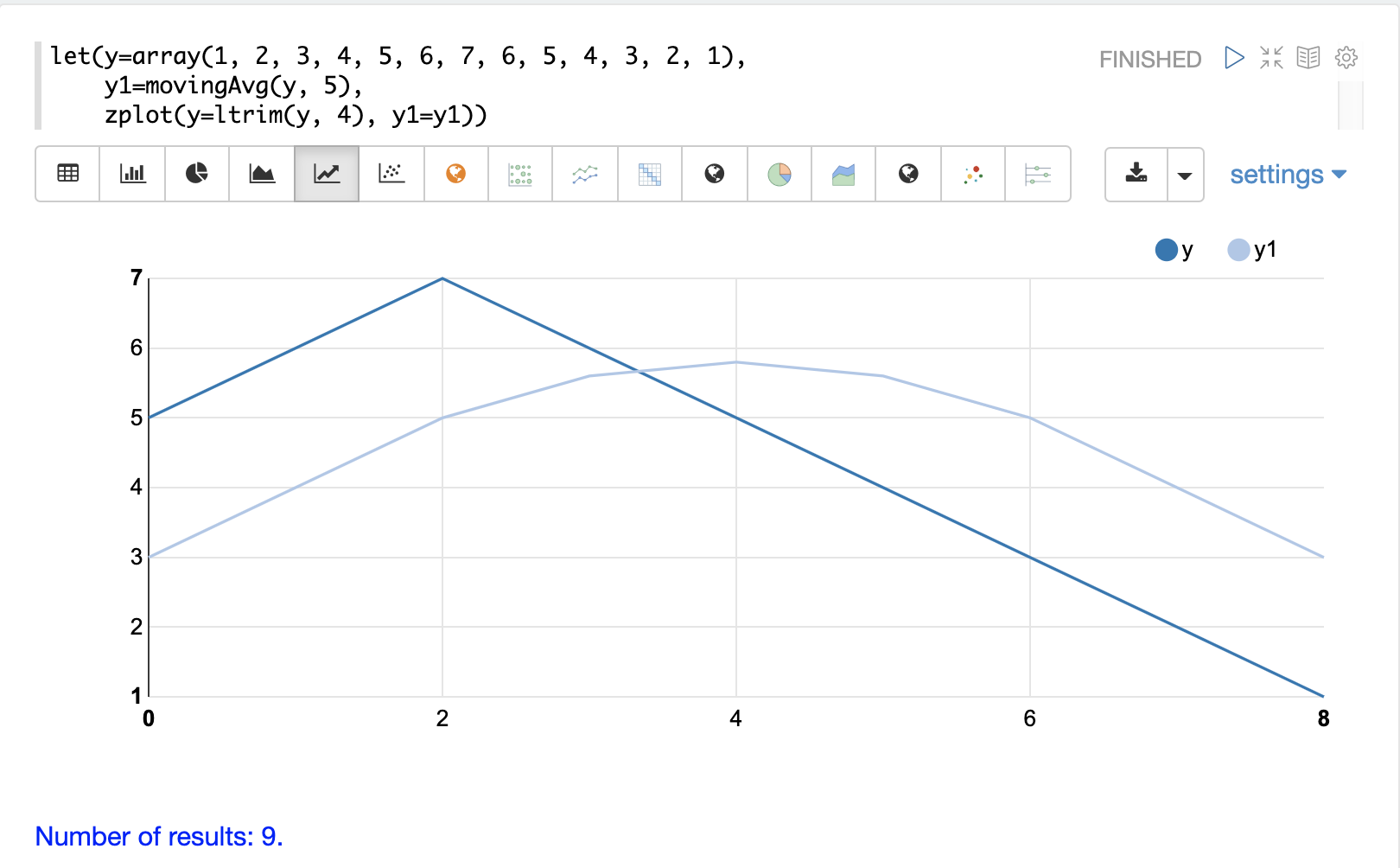
Below is an example of a moving average with a window size of 5.
Notice that the original vector has 13 elements but the result of the moving average has only 9 elements.
This is because the movingAvg function only begins generating results when it has a full window.
The ltrim function is used to trim the first four elements from the original y array to line up with the moving average.
Convolutional Smoothing
The moving average can also be computed using convolution.
In the example below the conv function is used to compute the moving average of the first array by applying the second array as a filter.
Looking at the result, we see that the convolution produced an array with 17 values instead of the 9 values created by the moving average.
That is because the conv function pads zeros to the front and back of the first vector so that the window size is always full.
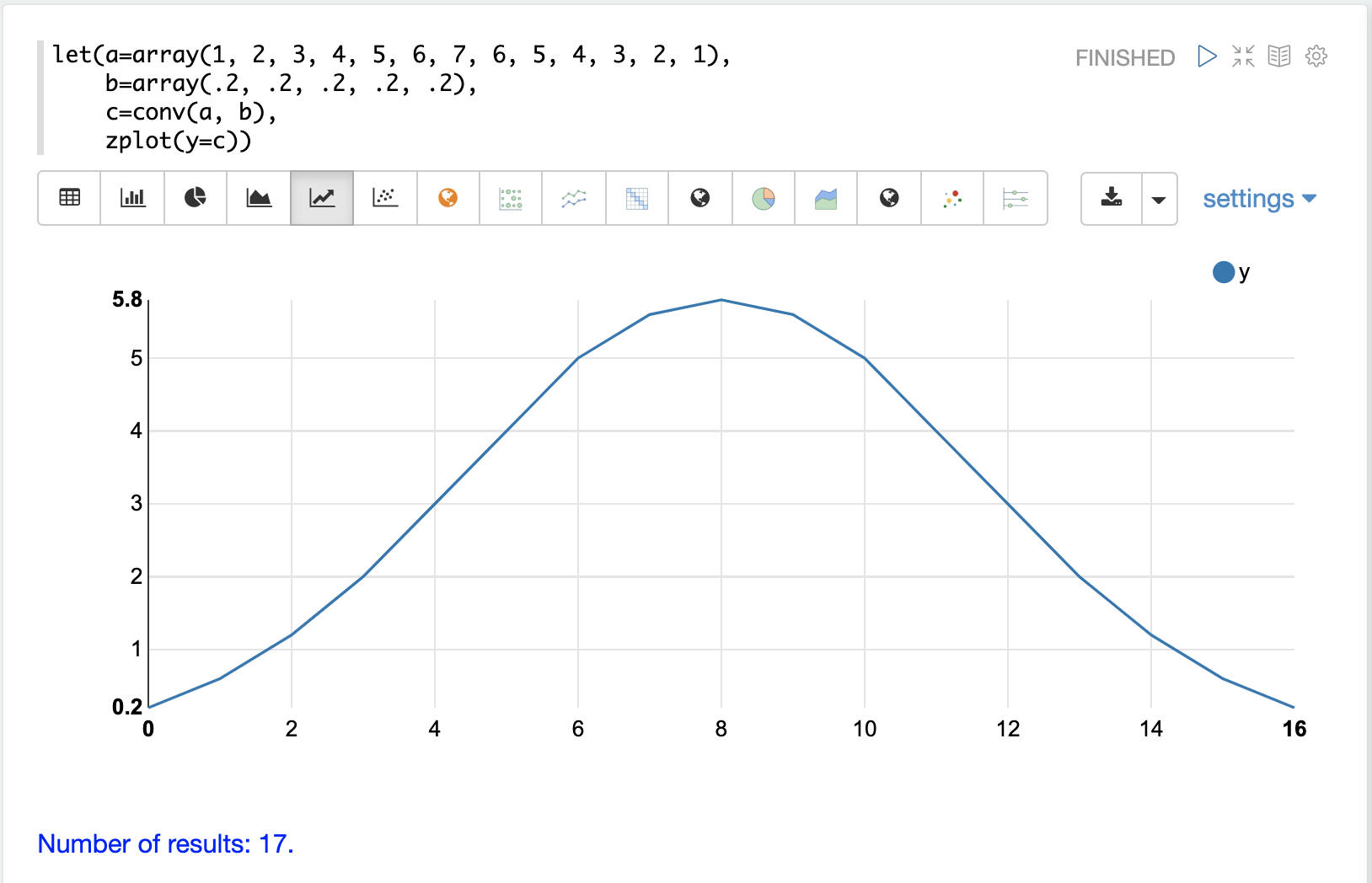
We achieve the same result as the movingAvg function by trimming the first and last 4 values of the convolution result using the ltrim and rtrim functions.
The example below plots both the trimmed convolution and the moving average on the same plot. Notice that they perfectly overlap.
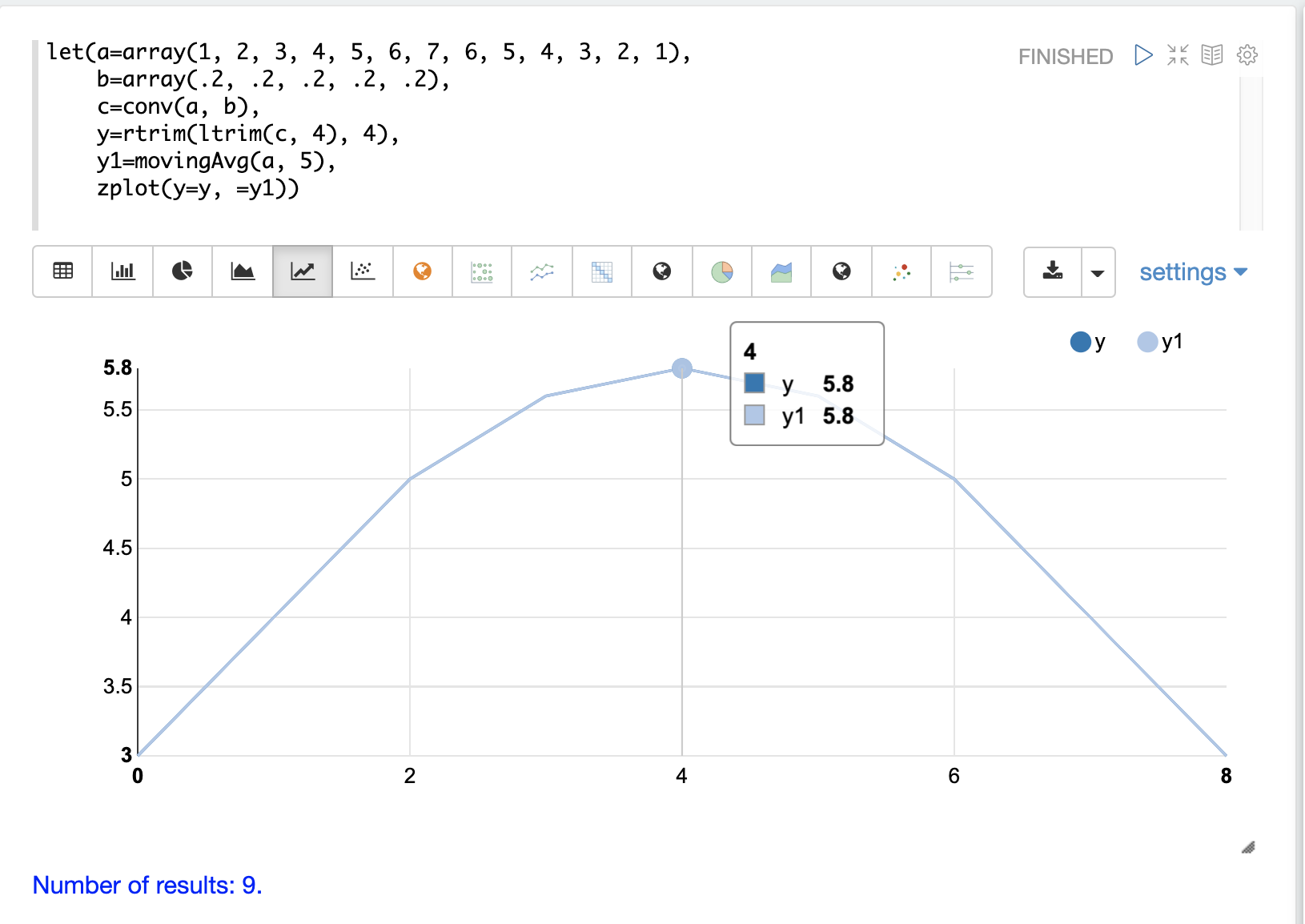
This demonstrates how convolution can be used to smooth a signal by sliding a filter across the signal and computing the dot product at each point. The smoothing effect is caused by the design of the filter. In the example, the filter length is 5 and each value in the filter is .2. This filter calculates a simple moving average with a window size of 5.
The formula for computing a simple moving average using convolution is to make the filter length the window size and make the values of the filter all the same and sum to 1. A moving average with a window size of 4 can be computed by changing the filter to a length of 4 with each value being .25.
Changing the Weights
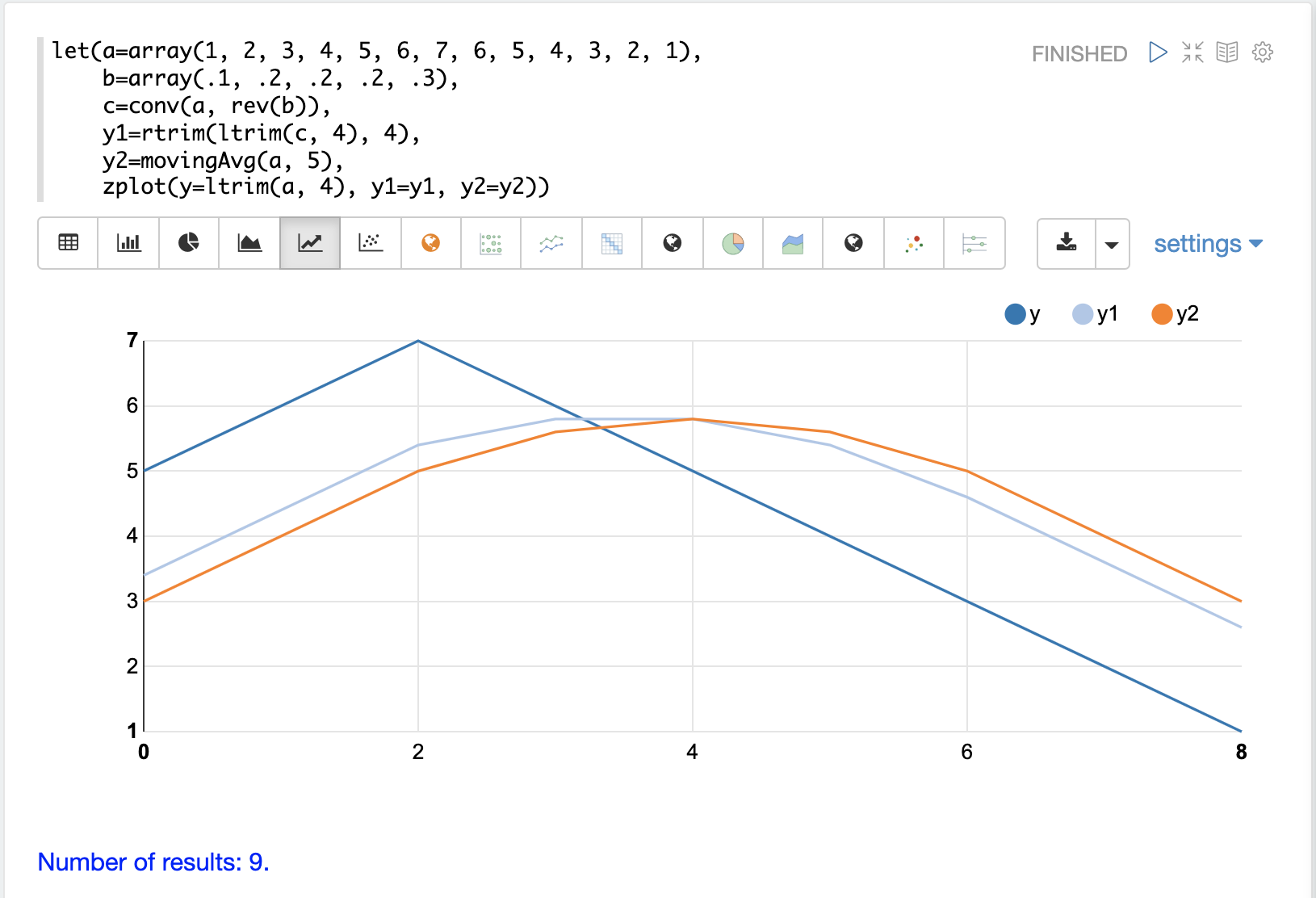
The filter, which is sometimes called the kernel, can be viewed as a vector of weights. In the initial example all values in the filter have the same weight (.2). The weights in the filter can be changed to produce different smoothing effects. This is demonstrated in the example below.
In this example the filter increases in weight from .1 to .3.
This places more weight towards the front of the filter.
Notice that the filter is reversed with the rev function before the conv function applies it.
This is done because convolution will reverse the filter.
In this case we reverse it ahead of time and when convolution reverses it back, it is the same as the original filter.
The plot shows the effect of the different weights in the filter. The dark blue line is the initial array. The light blue line is the convolution and the orange line is the moving average. Notice that the convolution responds quicker to the movements in the underlying array. This is because more weight has been placed at the front of the filter.
Cross-Correlation
Cross-correlation is used to determine the delay between two signals. This is accomplished by sliding one signal across another and calculating the dot product at each shift. The dot products are collected into a vector which represents the correlation at each shift. The highest dot product in the cross-correlation vector is the point where the two signals are most closely correlated.
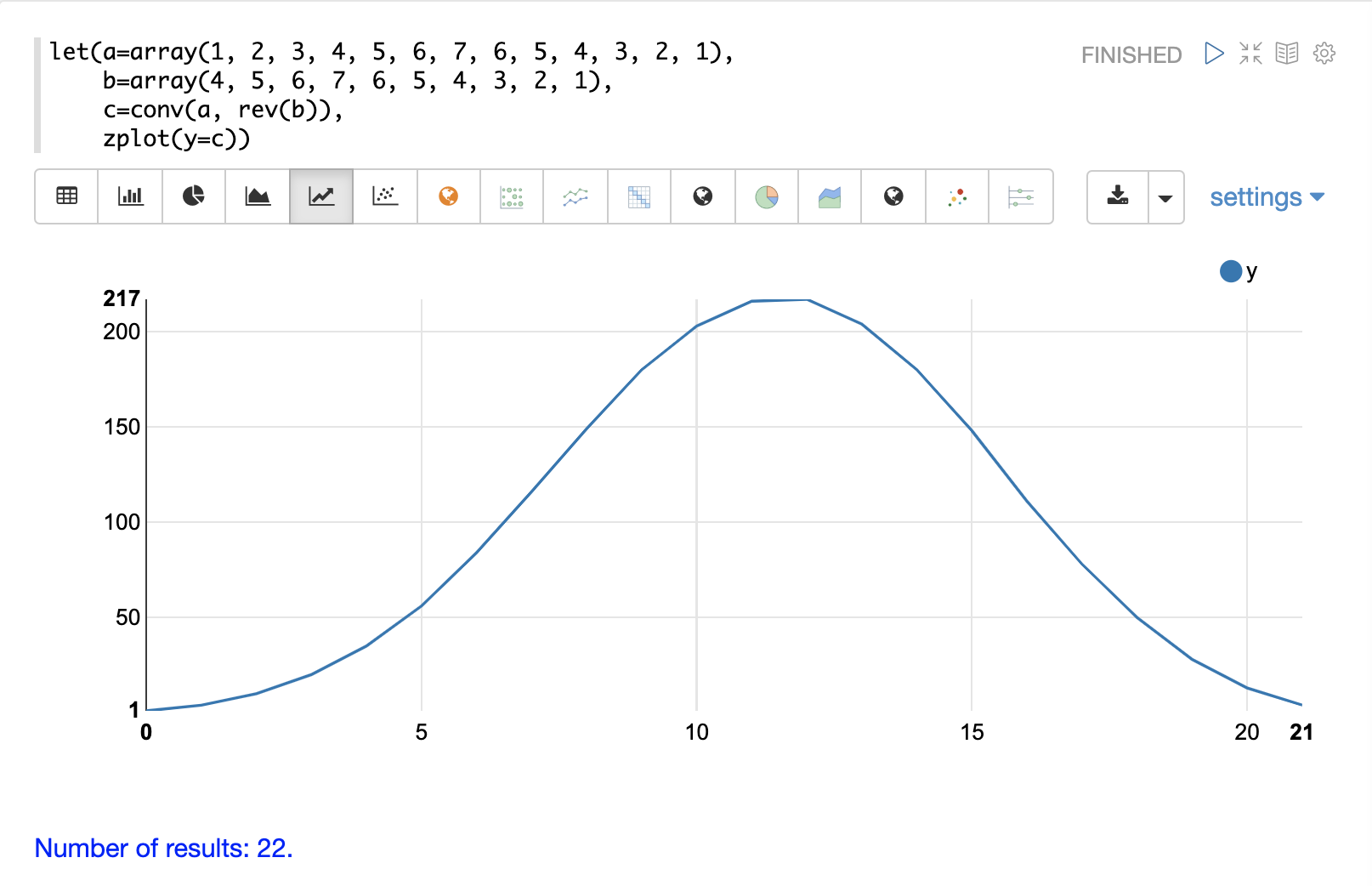
The sliding dot product used in convolution can also be used to represent cross-correlation between two vectors. The only difference in the formula when representing correlation is that the second vector is not reversed.
Notice in the example below that the second vector is reversed by the rev function before it is operated on by the conv function.
The conv function reverses the second vector so it will be flipped back to its original order to perform the correlation calculation rather than the convolution calculation.
Notice in the result the highest value is 217. This is the point where the two vectors have the highest correlation.
Find Delay
It is fairly simple to compute the delay from the cross-correlation result, but a convenience function called finddelay can be used to find the delay directly.
Under the covers finddelay uses convolutional math to compute the cross-correlation vector and then computes the delay between the two signals.
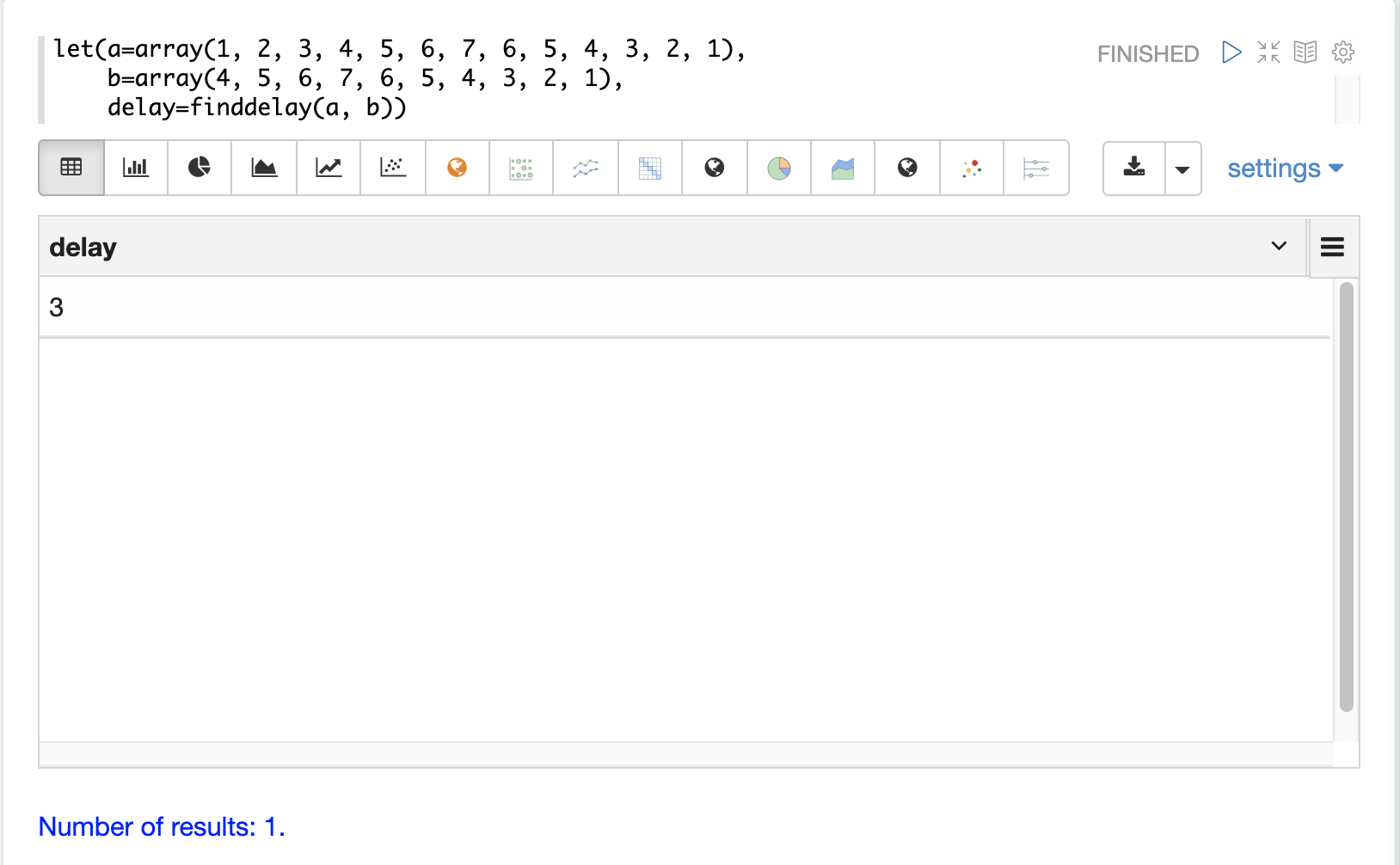
Below is an example of the finddelay function.
Notice that the finddelay function reports a 3 period delay between the first and second signal.
Oscillate (Sine Wave)
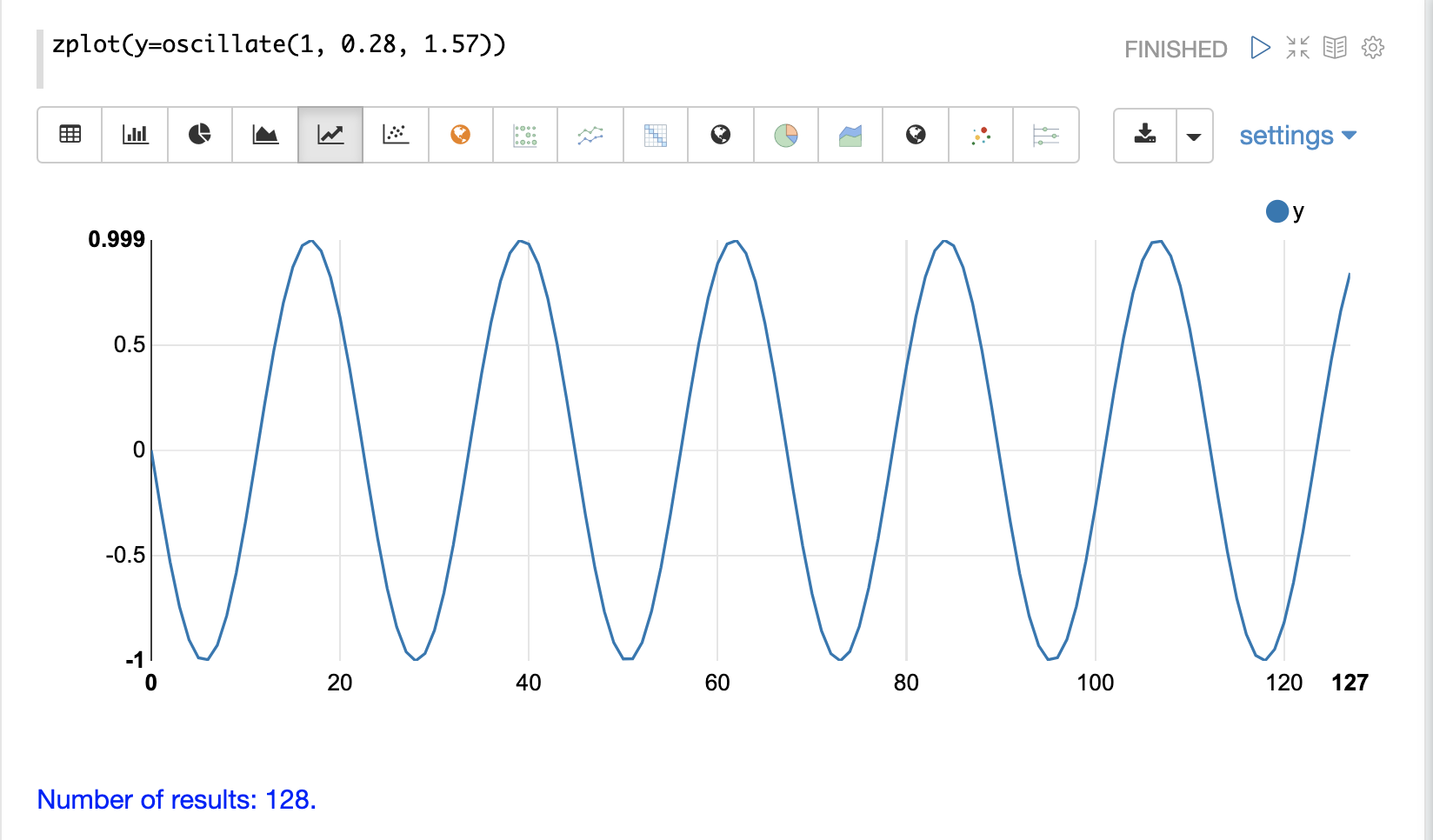
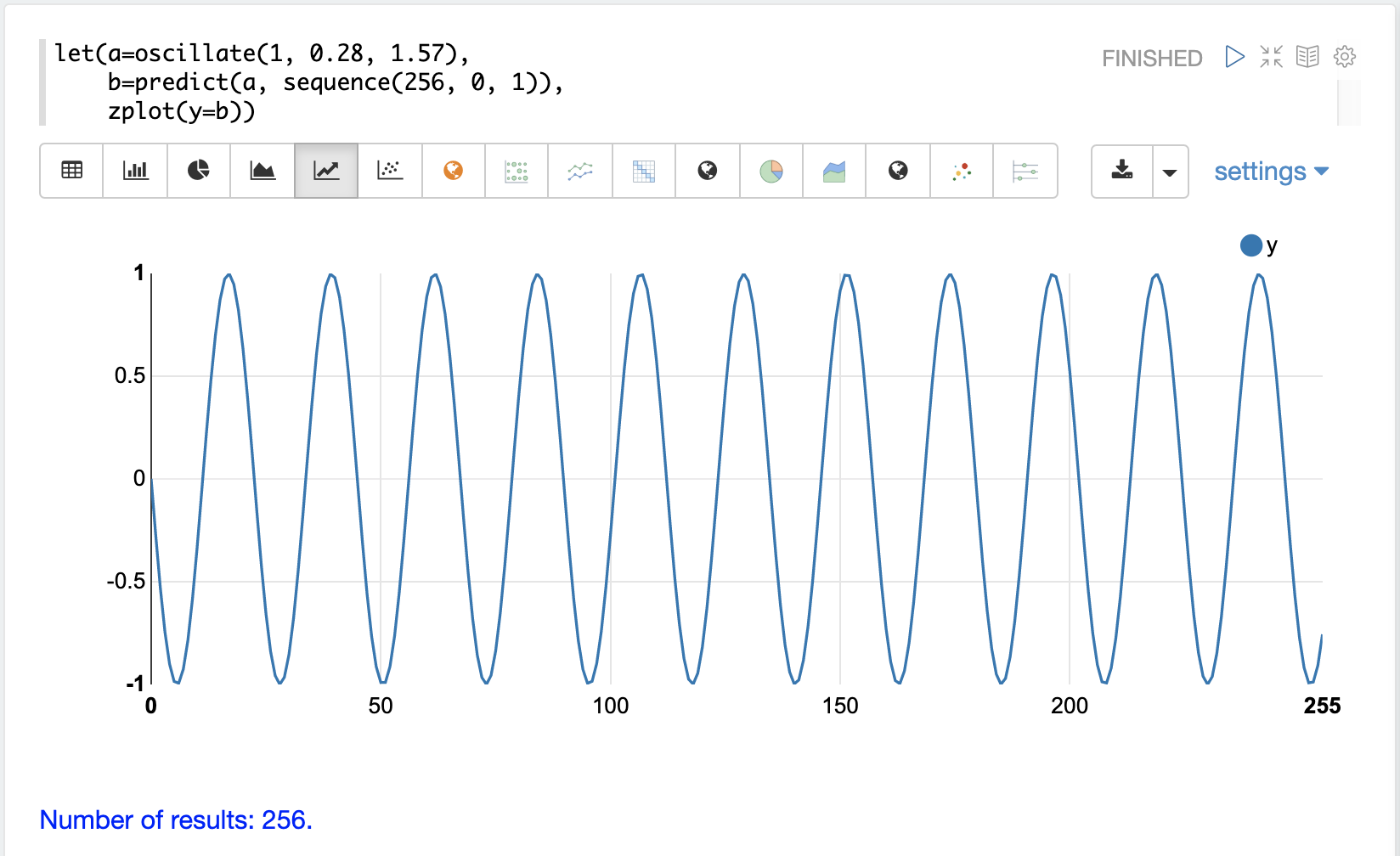
The oscillate function generates a periodic oscillating signal which can be used to model and study sine waves.
The oscillate function takes three parameters: amplitude, angular frequency, and phase and returns a vector containing the y-axis points of a sine wave.
The y-axis points were generated from an x-axis sequence of 0-127.
Below is an example of the oscillate function called with an amplitude of
1, and angular frequency of .28 and phase of 1.57.
Autocorrelation
Autocorrelation measures the degree to which a signal is correlated with itself. Autocorrelation is used to determine if a vector contains a signal or is purely random.
A few examples, with plots, will help to understand the concepts.
The first example simply revisits the example above of an extrapolated sine wave. The result of this is plotted in the image below. Notice that there is a structure to the plot that is clearly not random.
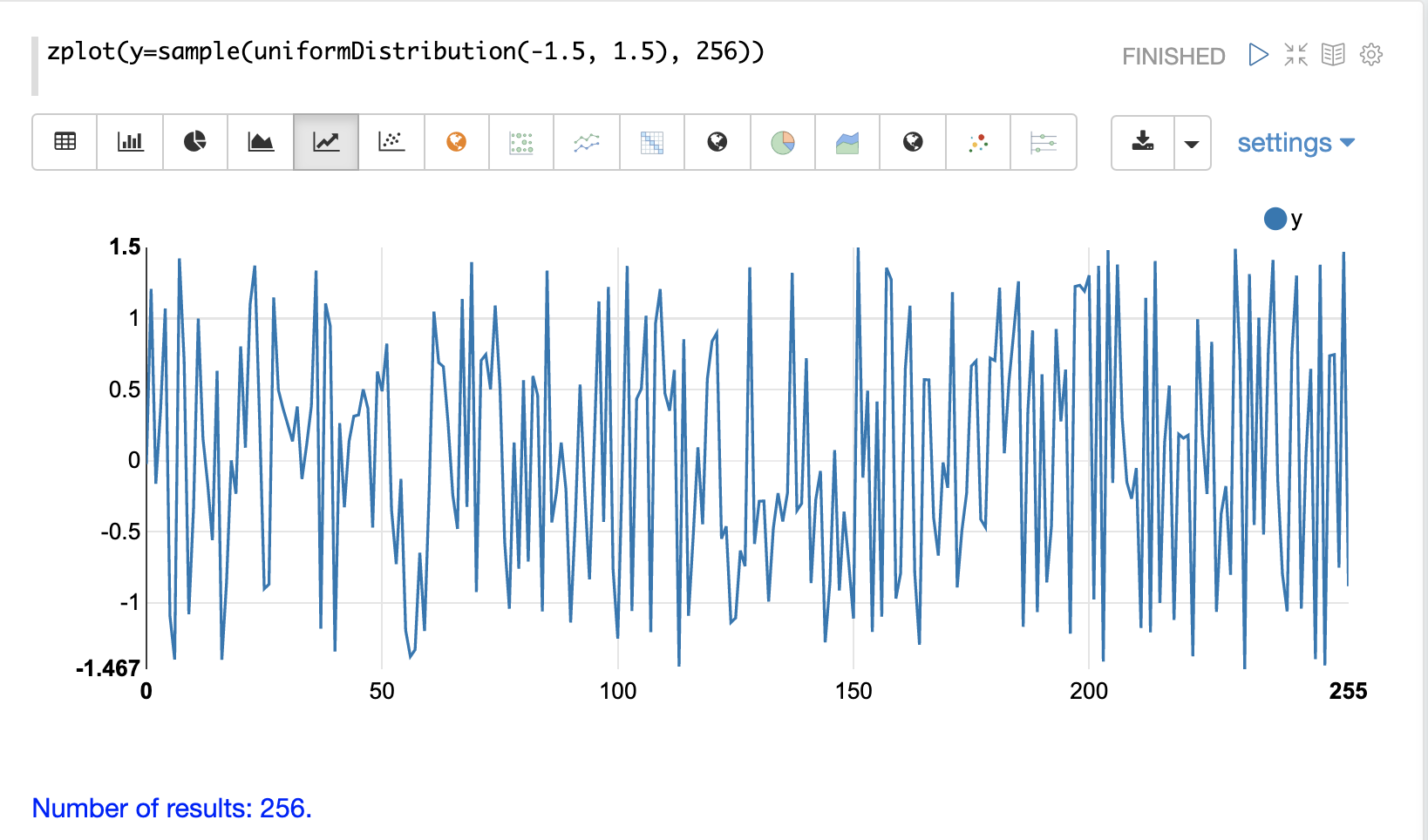
In the next example the sample function is used to draw 256 samples from a uniformDistribution to create a vector of random data.
The result of this is plotted in the image below.
Notice that there is no clear structure to the data and the data appears to be random.
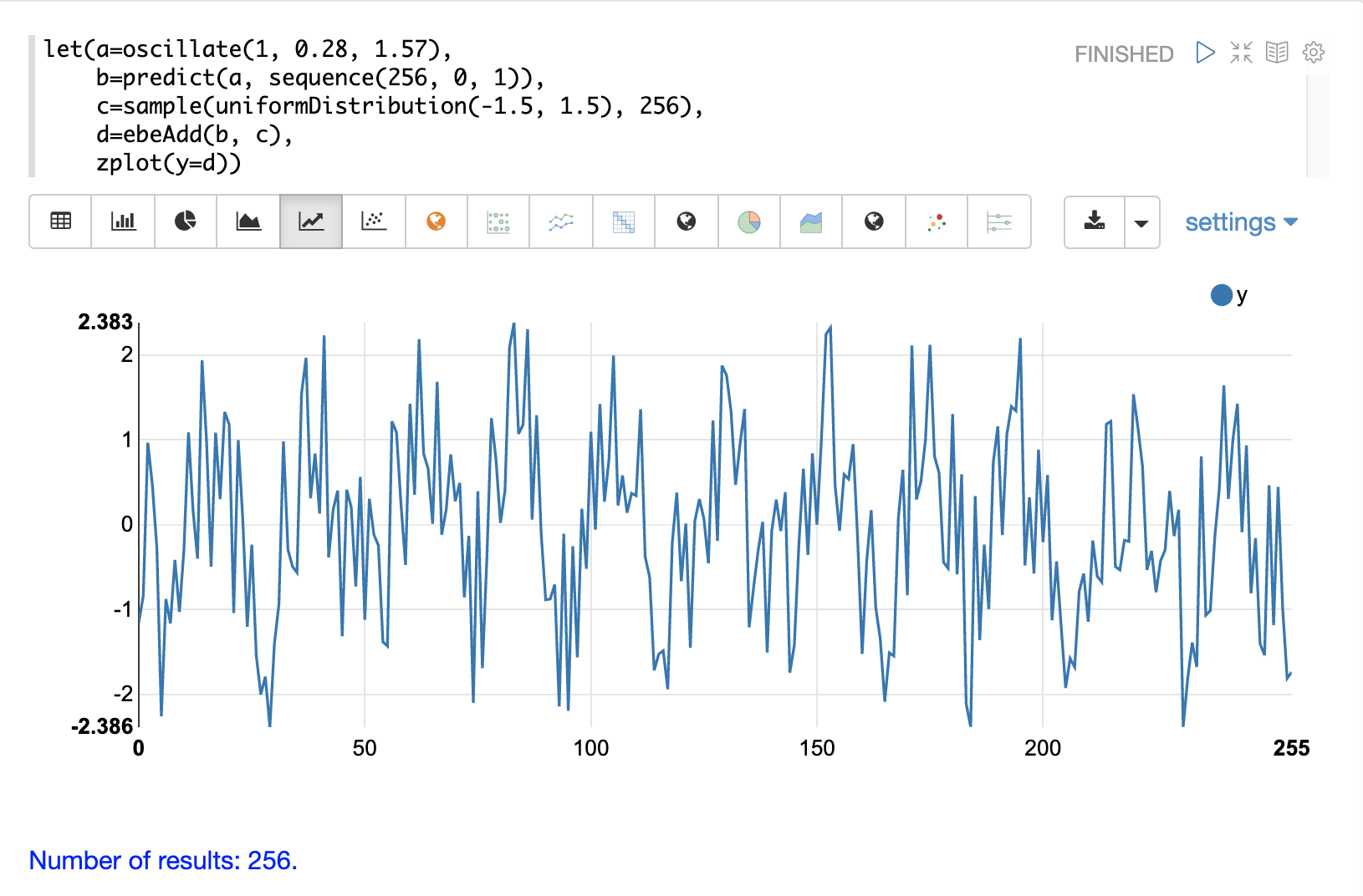
In the next example the random noise is added to the sine wave using the ebeAdd function.
The result of this is plotted in the image below.
Notice that the sine wave has been hidden somewhat within the noise.
Its difficult to say for sure if there is structure.
As plots becomes more dense it can become harder to see a pattern hidden within noise.
In the next examples autocorrelation is performed with each of the vectors shown above to see what the autocorrelation plots look like.
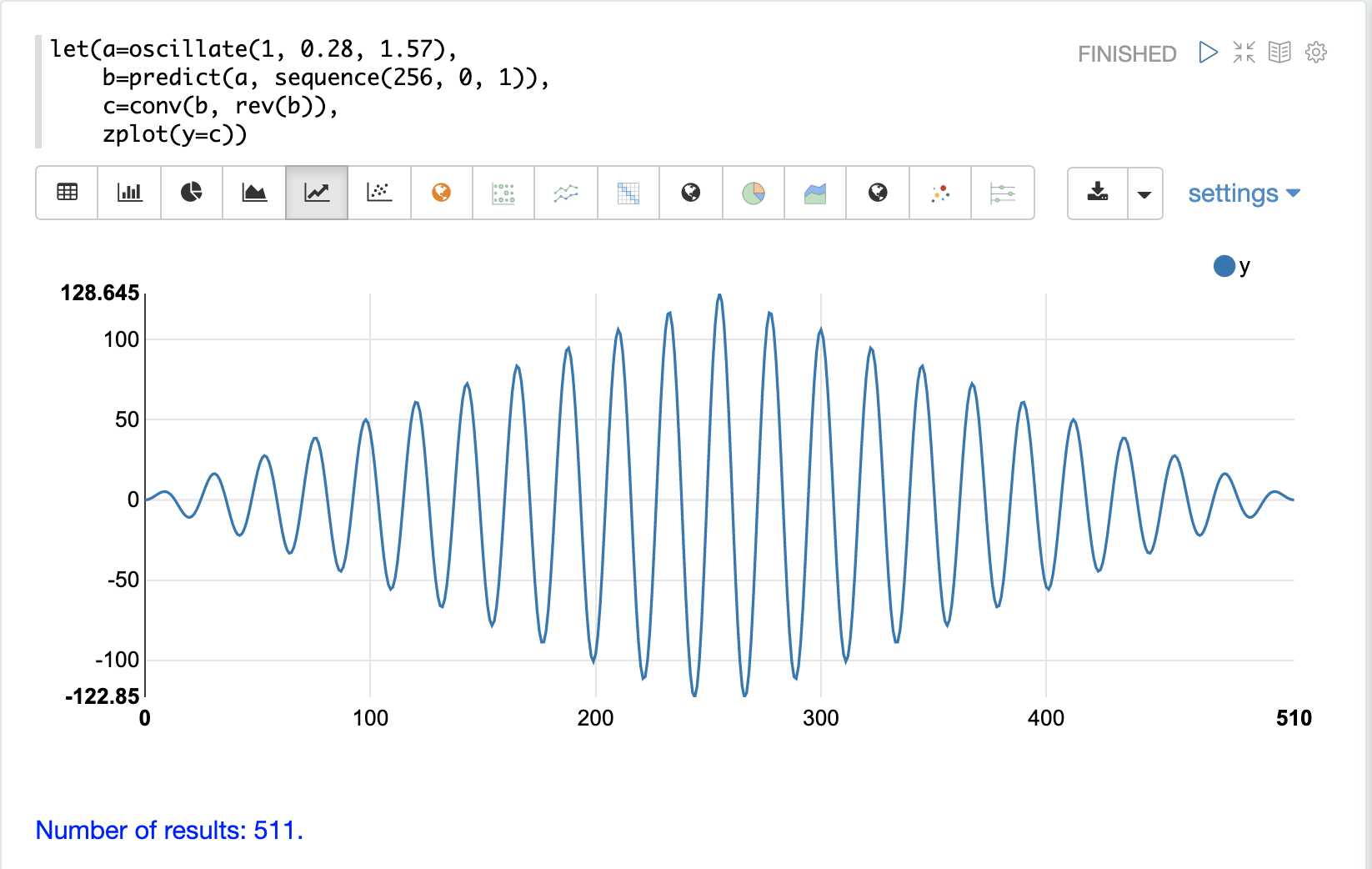
In the example below the conv function is used to autocorrelate the first vector which is the sine wave.
Notice that the conv function is simply correlating the sine wave with itself.
The plot has a very distinct structure to it. As the sine wave is slid across a copy of itself the correlation moves up and down in increasing intensity until it reaches a peak. This peak is directly in the center and is the point where the sine waves are directly lined up. Following the peak the correlation moves up and down in decreasing intensity as the sine wave slides farther away from being directly lined up.
This is the autocorrelation plot of a pure signal.
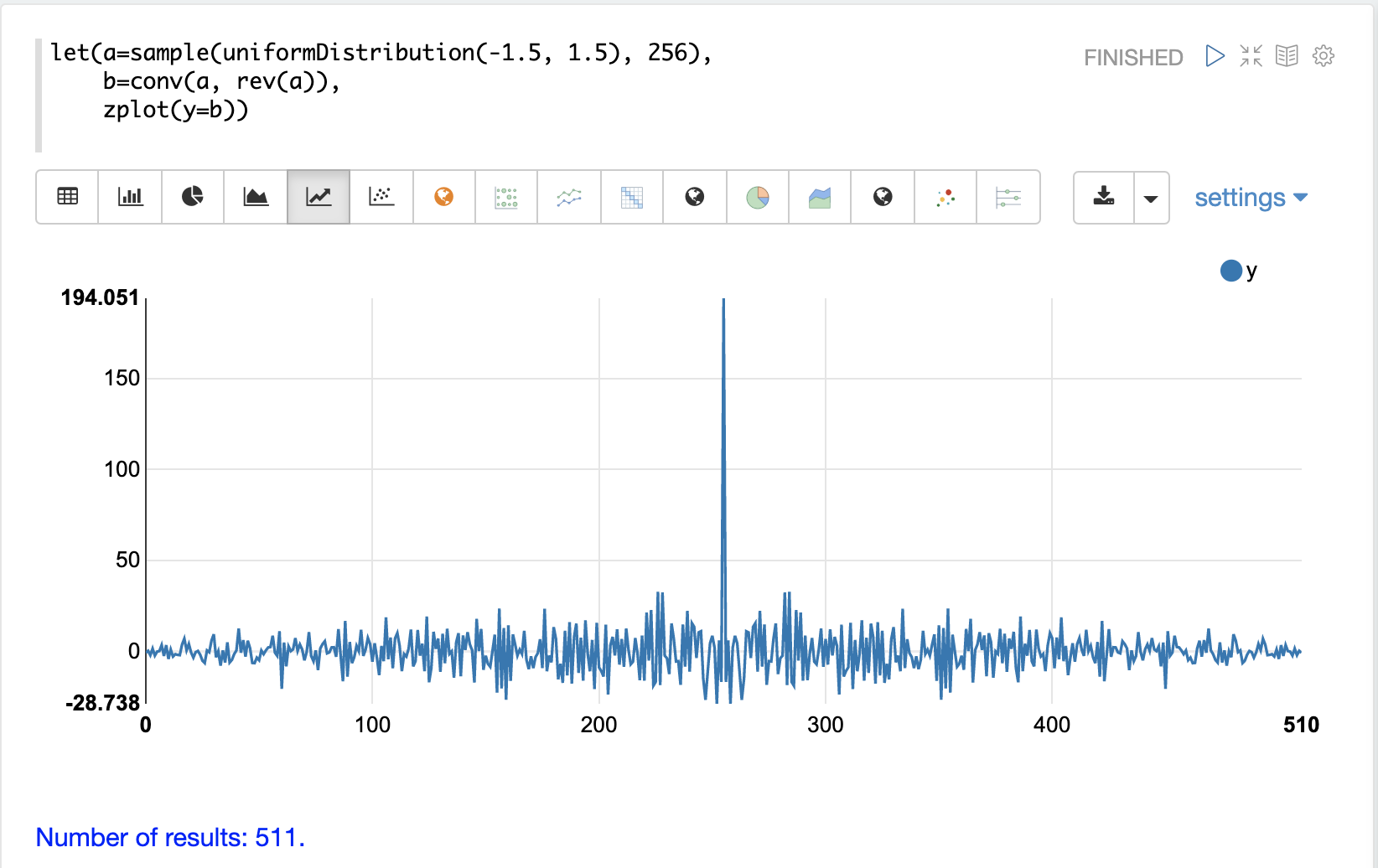
In the example below autocorrelation is performed with the vector of pure noise. Notice that the autocorrelation plot has a very different plot then the sine wave. In this plot there is long period of low intensity correlation that appears to be random. Then in the center a peak of high intensity correlation where the vectors are directly lined up. This is followed by another long period of low intensity correlation.
This is the autocorrelation plot of pure noise.
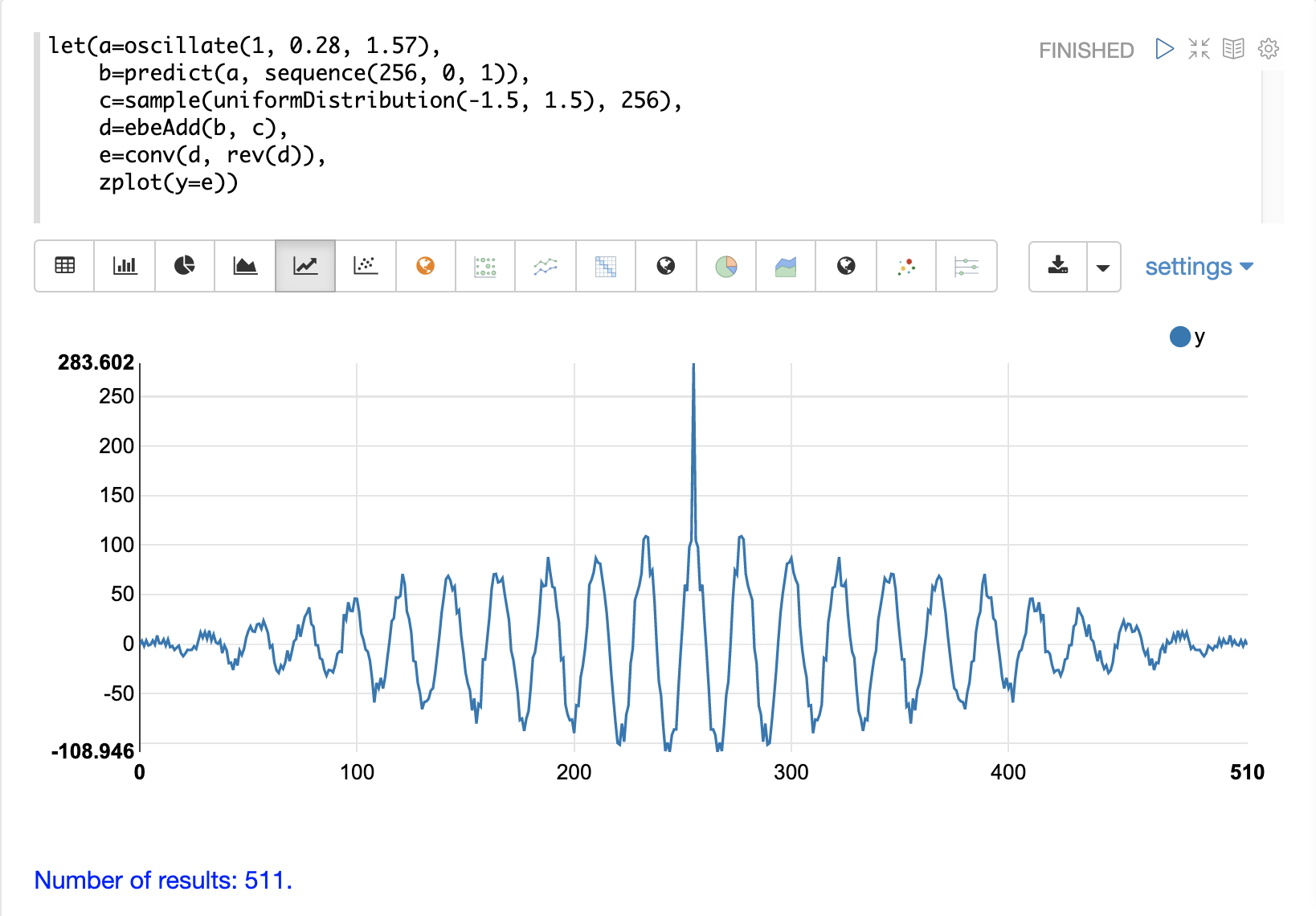
In the example below autocorrelation is performed on the vector with the sine wave hidden within the noise. Notice that this plot shows very clear signs of structure which is similar to autocorrelation plot of the pure signal. The correlation is less intense due to noise but the shape of the correlation plot suggests strongly that there is an underlying signal hidden within the noise.
Discrete Fourier Transform
The convolution-based functions described above are operating on signals in the time domain. In the time domain the x-axis is time and the y-axis is the quantity of some value at a specific point in time.
The discrete Fourier Transform translates a time domain signal into the frequency domain. In the frequency domain the x-axis is frequency, and y-axis is the accumulated power at a specific frequency.
The basic principle is that every time domain signal is composed of one or more signals (sine waves) at different frequencies. The discrete Fourier transform decomposes a time domain signal into its component frequencies and measures the power at each frequency.
The discrete Fourier transform has many important uses. In the example below, the discrete Fourier transform is used to determine if a signal has structure or if it is purely random.
Complex Result
The fft function performs the discrete Fourier Transform on a vector of real data.
The result of the fft function is returned as complex numbers.
A complex number has two parts, real and imaginary.
The real part of the result describes the magnitude of the signal at different frequencies.
The imaginary part of the result describes the phase.
The examples below deal only with the real part of the result.
The fft function returns a matrix with two rows.
The first row in the matrix is the real part of the complex result.
The second row in the matrix is the imaginary part of the complex result.
The rowAt function can be used to access the rows so they can be processed as vectors.
Fast Fourier Transform Examples
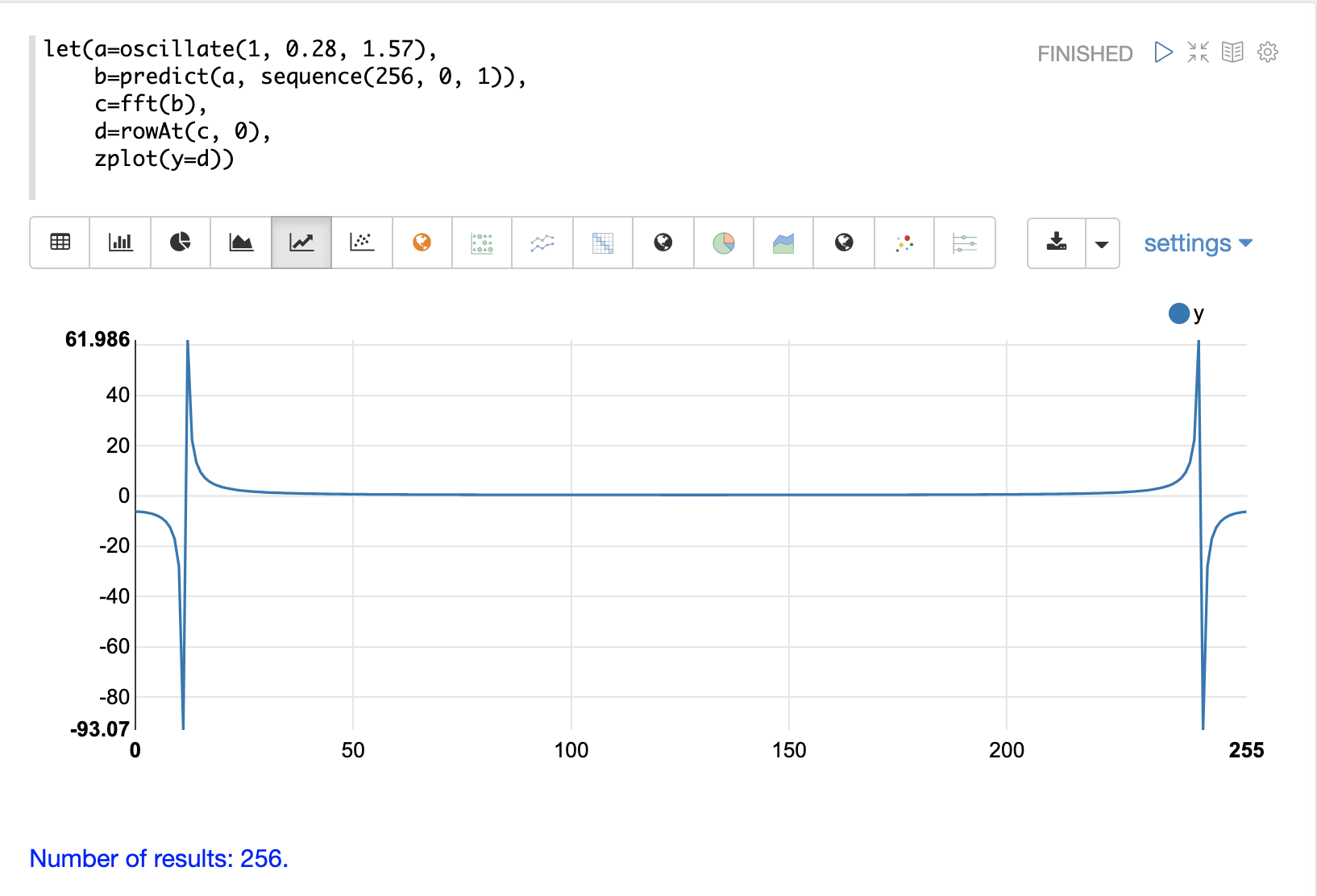
In the first example the fft function is called on the sine wave used in the autocorrelation example.
The results of the fft function is a matrix.
The rowAt function is used to return the first row of the matrix which is a vector containing the real values of the fft response.
The plot of the real values of the fft response is shown below.
Notice there are two peaks on opposite sides of the plot.
The plot is actually showing a mirrored response.
The right side of the plot is an exact mirror of the left side.
This is expected when the fft is run on real rather than complex data.
Also notice that the fft has accumulated significant power in a single peak.
This is the power associated with the specific frequency of the sine wave.
The vast majority of frequencies in the plot have close to 0 power associated with them.
This fft shows a clear signal with very low levels of noise.
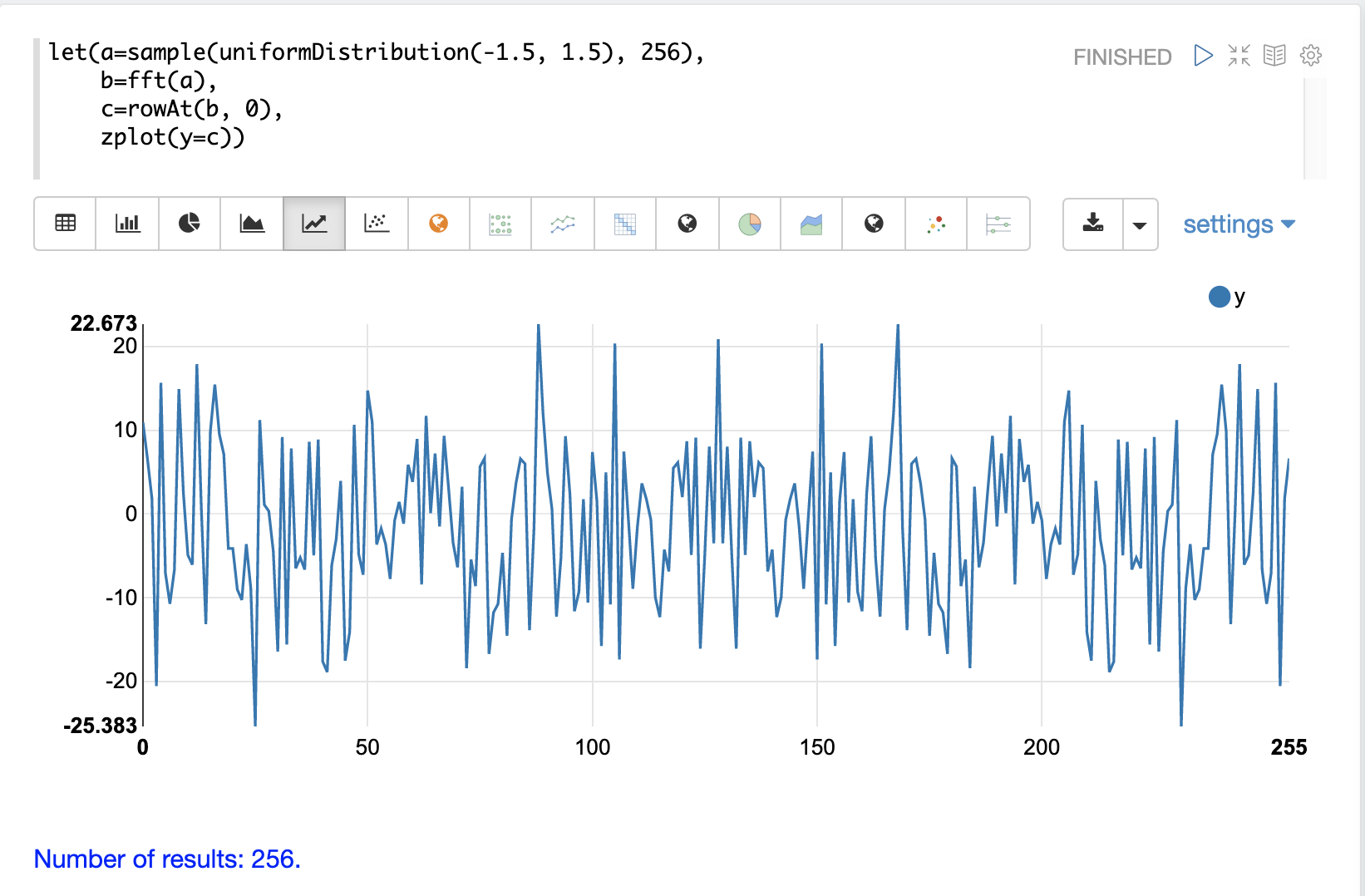
In the second example the fft function is called on a vector of random data similar to one used in the autocorrelation example.
The plot of the real values of the fft response is shown below.
Notice that in is this response there is no clear peak.
Instead all frequencies have accumulated a random level of power.
This fft shows no clear sign of signal and appears to be noise.
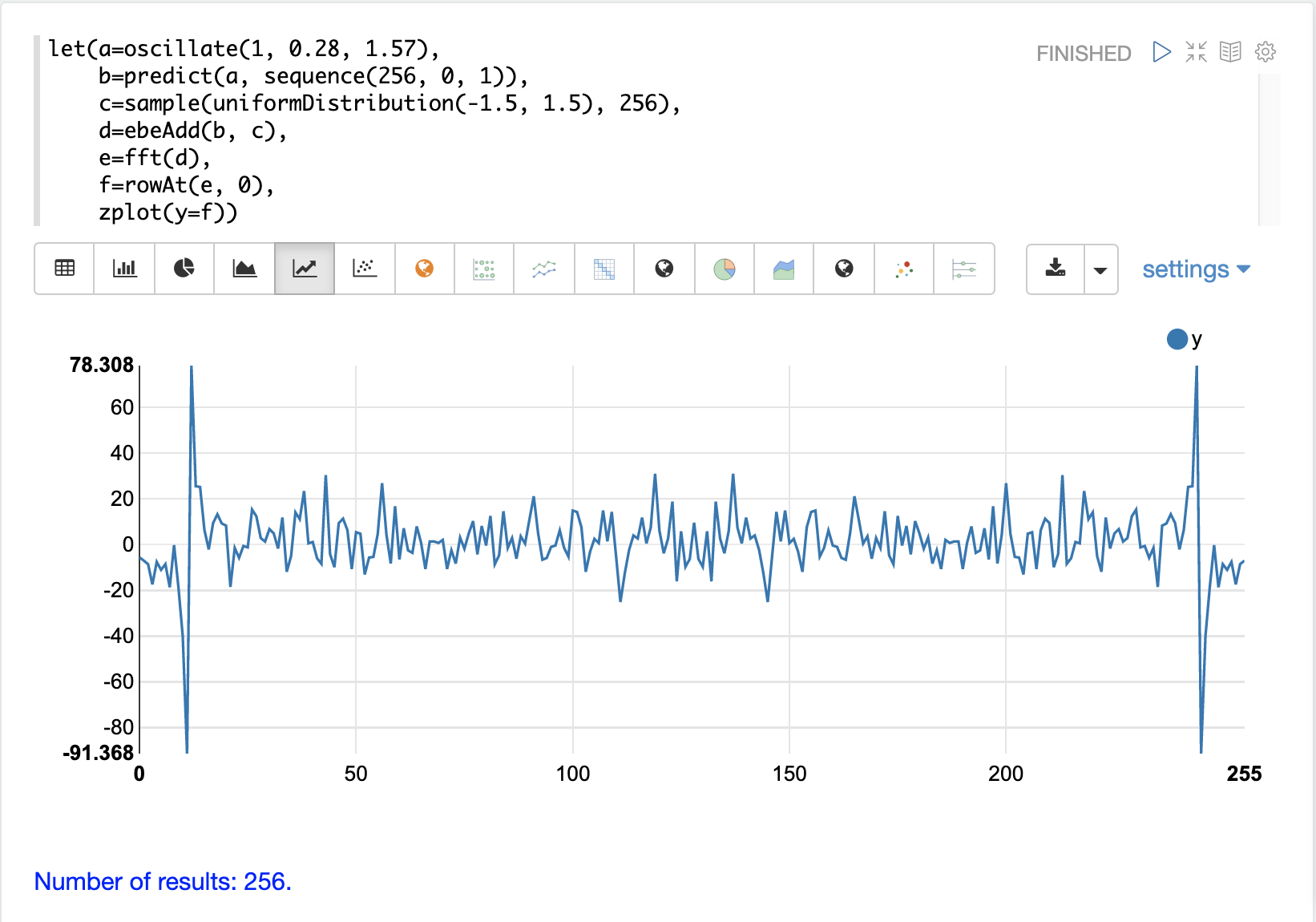
In the third example the fft function is called on the same signal hidden within noise that was used for the autocorrelation example.
The plot of the real values of the fft response is shown below.
Notice that there are two clear mirrored peaks, at the same locations as the fft of the pure signal.
But there is also now considerable noise on the frequencies.
The fft has found the signal and but also shows that there is considerable noise along with the signal.